
Arduino 使用MCP2515模块进行CANBUS通讯
目录
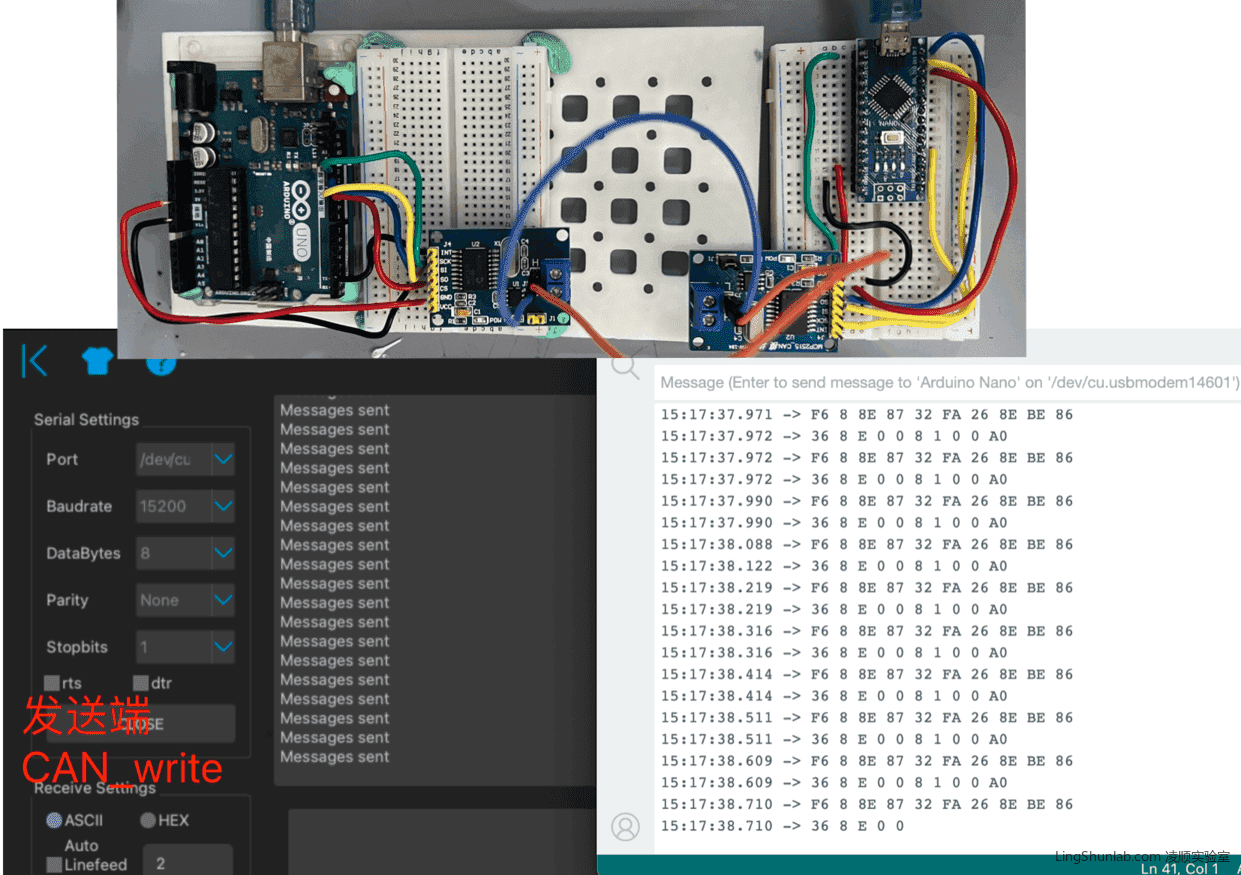
实验效果
凌顺实验室(lingshunlab.com)分享使用Arduino Uno + MCP2515 模块和 Arduino Nano + MCP2515 模块 进行CANBUS通讯。
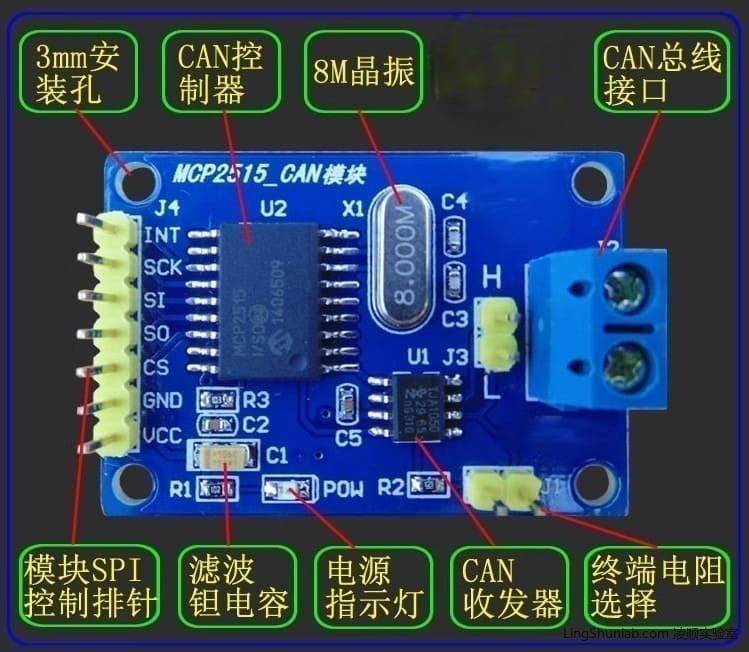
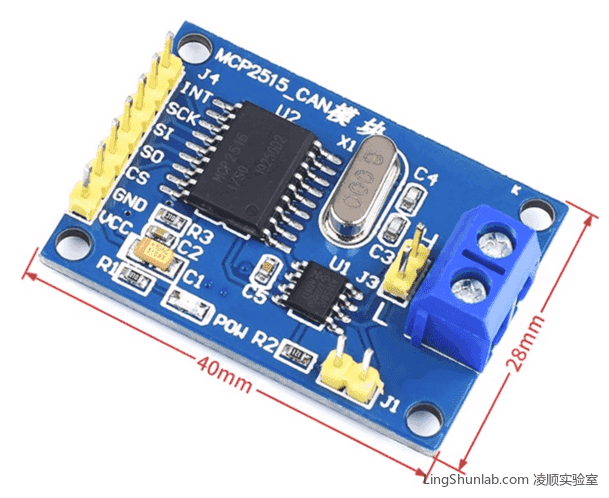
元件说明
模块特性:
1、支持CAN V2.0B技术规范,通讯速率1Mb/S
2、0~8字节长的数据字段
3、标准帧、拓展帧和远程帧
4、模块5V DC电源供电,SPI接口 协议控制
5、120欧姆终端电阻。阻抗匹配,保证驱动能力,长距离数据传输防止信号放射
6、模块尺寸:4.4cm x 2.8cm 定位螺丝孔中心间距23mm x 38mm
7、工作电流:典型值5mA,待机电流1微安。电源指示灯除外。
8、工作温度:工业级-40℃ 至 85℃
引脚说明
VCC: 5V供电
GND: 接地
CS: SPI接口的片选输入引脚
SO: SPI接口的数据输出引脚
Sl: SPI接口的数据输入引脚
SCK: SPI接口的时钟输入引脚
INT: 中断输出引脚
BOM表
Arduino Uno x1
Arduino Nano x1
MCP2515 x2
面包板 若干
跳线 若干
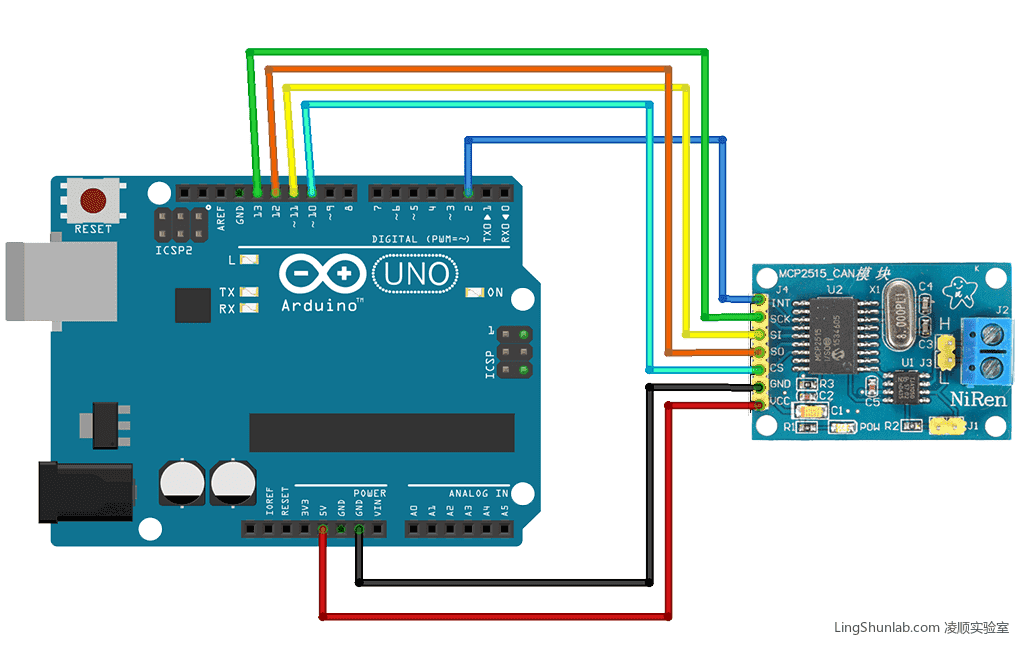
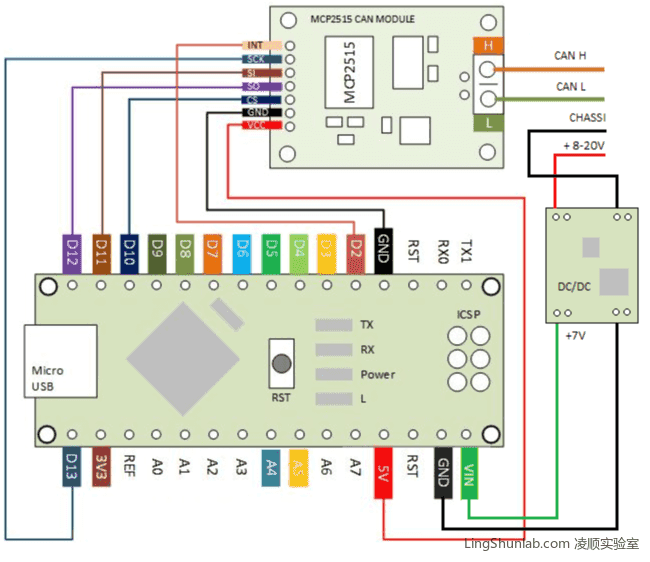
接线图
完整接线图
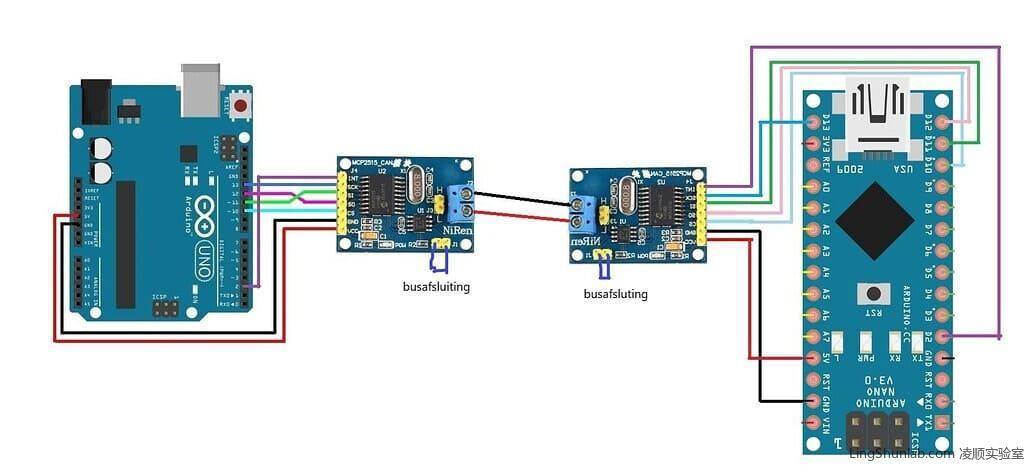
Arduino Uno接线图(部分放大)
Arduino Nano接线图(部分放大)
安装库
arduino-mcp2515
https://github.com/autowp/arduino-mcp2515
程序代码
无论Uno还是Nano做发送端或者接收端都可以的
上传程序的时候请注意选择好对应的开发板和端口
CANBUS发送代码(CAN_write)
// welcome to lingshunlab.com
#include <SPI.h>
#include <mcp2515.h>
struct can_frame canMsg1;
struct can_frame canMsg2;
MCP2515 mcp2515(10);
void setup() {
canMsg1.can_id = 0x0F6;
canMsg1.can_dlc = 8;
canMsg1.data[0] = 0x8E;
canMsg1.data[1] = 0x87;
canMsg1.data[2] = 0x32;
canMsg1.data[3] = 0xFA;
canMsg1.data[4] = 0x26;
canMsg1.data[5] = 0x8E;
canMsg1.data[6] = 0xBE;
canMsg1.data[7] = 0x86;
canMsg2.can_id = 0x036;
canMsg2.can_dlc = 8;
canMsg2.data[0] = 0x0E;
canMsg2.data[1] = 0x00;
canMsg2.data[2] = 0x00;
canMsg2.data[3] = 0x08;
canMsg2.data[4] = 0x01;
canMsg2.data[5] = 0x00;
canMsg2.data[6] = 0x00;
canMsg2.data[7] = 0xA0;
while (!Serial);
Serial.begin(115200);
mcp2515.reset();
mcp2515.setBitrate(CAN_125KBPS);
mcp2515.setNormalMode();
Serial.println("Example: Write to CAN");
}
void loop() {
mcp2515.sendMessage(&canMsg1);
mcp2515.sendMessage(&canMsg2);
Serial.println("Messages sent");
delay(100);
}
CANBUS接收代码(CAN_read)
// welcome to lingshunlab.com
#include <SPI.h>
#include <mcp2515.h>
struct can_frame canMsg;
MCP2515 mcp2515(10);
void setup() {
Serial.begin(115200);
mcp2515.reset();
mcp2515.setBitrate(CAN_125KBPS);
mcp2515.setNormalMode();
Serial.println("------- CAN Read ----------");
Serial.println("ID DLC DATA");
}
void loop() {
if (mcp2515.readMessage(&canMsg) == MCP2515::ERROR_OK) {
Serial.print(canMsg.can_id, HEX); // print ID
Serial.print(" ");
Serial.print(canMsg.can_dlc, HEX); // print DLC
Serial.print(" ");
for (int i = 0; i<canMsg.can_dlc; i++) { // print the data
Serial.print(canMsg.data[i],HEX);
Serial.print(" ");
}
Serial.println();
}
}
")
 显示中文")